
1.0はじめに:機械安全の重要性
産業オートメーションにおいて、機械の安全性は人命の保護、システムの安定性の確保、そして法的要求事項の遵守に不可欠です。ISO 13849は、制御システムの安全関連部(SRP/CS)の設計と検証に関するグローバルなガイダンスを提供し、機械製造における安全性の重要な技術基盤を形成しています。
2.0ISO 13849とは何ですか?
ISO 13849は、機械制御システムの安全関連部品の設計に焦点を当てた機能安全規格です。以下の2つの部分で構成されています。
- ISO 13849-1:2023パート 1: 設計の一般原則、安全要件、および SRP/CS の統合に関するガイダンス。
- ISO 13849-2パート 2: 検証では、安全機能を分析またはテストし、達成されたパフォーマンス レベル (PL) を確認する方法が提供されます。
ISO 13849はリスクベースの規格です。リスク評価に基づいて必要な安全機能を定義し、リスクを許容レベルまで低減するために達成すべきパフォーマンスレベルを規定しています。この規格は、以下を含む幅広い機械に適用されます。 プレスブレーキ、スタンピングマシン、 デコイラー、供給ライン、射出成形機、包装装置、切断機など。
2.1ISO 13849-1:2023の新機能
2023年の改訂では、構造と明瞭性の両方が改善され、より直感的な導入が可能になりました。主な変更点は以下のとおりです。
- 用語の更新: 置き換え SRP/CS 一貫性と明確さを保つため、標準全体では「サブシステム」という用語を使用します。
- 安全機能の定義の改善: 安全機能と安全要件仕様 (SRS) の構造と内容を明確にします。
- 強化されたカテゴリー2のガイダンス: カテゴリー 2 システムのアーキテクチャと障害処理に関するより詳細なガイダンスを提供します。
- 統合検証プロセス: 以前 ISO 13849-2 に含まれていた手順を組み込むことで、設計と検証を 1 つの標準に統合します。
- 信頼性要因への重点: 共通原因障害 (CCF)、ソフトウェアの信頼性、および EMC 耐性を重視します。
- 実用的な例を記載した拡張付録: ソフトウェア検証 (付録 N) や EMC 対策 (付録 L) などの実践的なガイダンスを追加します。
3.0コアコンセプトの説明
SRP/CS: 制御システムの安全関連部品
パフォーマンスレベル(PL): PL aからPL eまでの安全性能レベル
必要なパフォーマンスレベル(PLr): リスク評価によって決定された必要なPL
主なパラメータ:
- カテゴリ(システムアーキテクチャ分類)
- MTTFd(危険側故障までの平均時間)
- DC平均(平均診断範囲)
- CCF(共通原因故障耐性)
- ソフトウェアの安全性要件
4.0パフォーマンス レベル (PL) はどのように決定されますか?
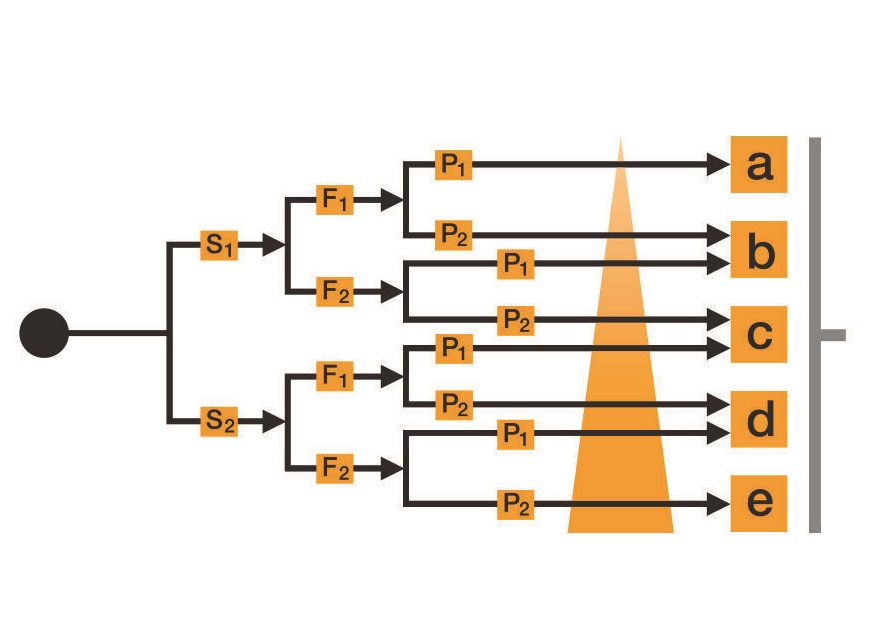
4.1グラフベースのリスク評価(EN ISO 13849-1に準拠)
リスクは次のように評価されます EN ISO 13849-1 リスクグラフを用いて評価します。評価は以下の3つの基準に基づいています。
- 傷害の重症度(S)
- 危険の頻度および/または暴露(F)
- 危険を回避し、または危害を制限する可能性(P)
この評価の結果は、 必要なパフォーマンスレベル(PLr) それぞれの安全機能ごとに、特定されたリスクを最小限に抑えることを目的としています。
- PL a に対応する 低い リスクのレベル、
- PL e に対応する 高い リスクのレベル。
4.2リスクパラメータ
S – 傷害の重症度
- S1 = 軽度(通常は可逆的な損傷)
- シーズン2 = 重篤(通常は回復不能な傷害または死亡)
F – 危険への頻度および/または暴露
- F1 = ほとんどまたはそれ以下の頻度で発生し、露出時間が短い
- F2 = 頻繁から連続的、または露出時間が長い
P – 危険を回避または損害を制限する可能性
- P1 = 特定の条件下では可能
- P2 = ほとんど不可能
4.3パラメータP(回避可能性)に影響を与える要因
危険を回避または制限する可能性(P) は、次の 5 つの要因によって影響を受けます。
- の スピード 危険が発生するタイミング(例:急速または緩慢)
- 物理的な可能性 危険を回避するため(例えば逃げるなど)
- 実践的な安全体験 プロセスまたは操作に関連する
- 操作が実行されるかどうか 専門家または非専門家
- 操作が実行されるかどうか 監督の有無にかかわらず
| パラメータPの決定 – 要因 | あ | B | C |
| 機械は | スペシャリスト | 一般人 | |
| 危険な事象を引き起こす可能性のある機械部分の速度 | 低速または非常に低速でのイベント | 中速でのイベント | 高速イベント |
| 危険を回避する物理的な可能性 | 少なくとも50 %のケースで可能 | 50 %未満のケースで可能 | 不可能 |
| 危険を認識・感知する可能性 | 少なくとも50 %のケースで可能 | 50 %未満のケースでのみ可能 | 不可能 |
| 操作の複雑さ | 複雑さが低い、またはインタラクションがない | 中程度から高い複雑さ |
「C」が選択されるか、「B」が3回以上選択された場合:P2
「C」が選択されず、「B」が2回選択された場合:状況に応じてP1またはP2
「C」が選択されておらず、「B」が0または1回選択されている場合: P1
例: スタンピングマシンまたはパッケージングマシンの安全インターロック機能については、動作原理を分析し、必要な PLr (PL d など) を特定し、MTTFd や DCavg などの入力を通じてシステムがこのレベルを達成していることを確認します。
5.0ISO 13849-1とIEC 62061の比較
| 側面 | ISO 13849-1 | IEC 62061 |
| アプローチ | カテゴリー + パフォーマンスレベル (PL) | SIL(安全度水準) |
| 適用対象 | 機械 | 複雑な自動化システム |
| 複雑 | 比較的シンプル | 詳細なシステム分析に役立つ |
| 統合 | 構造、タイミング、診断範囲 | 機能の成功確率、応答時間 |
6.0ISO 13849-1:2023の主な改訂
より明確な定義、「SRP/CS」を「サブシステム」という用語に置き換える
安全要件の標準化の強化
最適化された定義 カテゴリー2、特に強調して CCF
ソフトウェア安全性ガイダンスの改善(第7章)
ISO 13849-2の一部の検証内容をパート1に統合
拡張付録: CCF (付録 F)、EMC (付録 L)、安全要件仕様 (SRS、付録 M)、ソフトウェア検証例 (付録 N)
7.0実装の推奨事項とベストプラクティス
巻き出し機、プレスブレーキ、供給装置、レーザー切断装置などの高サイクル自動化機械の場合、人員の安全と規制遵守を確保するために、設計段階で ISO 13849 の原則を組み込むことが推奨されます。
制御システムの初期設計段階から安全機能を考慮する
単一ポイントコントローラへの過度の依存を避け、強力なハードウェア/ソフトウェア連携を確保する
コンプライアンスを証明するための徹底的かつ一貫性のある技術文書を維持する
次のような実用的なツールを活用する システマ 構造安全性解析用
8.0ISO 13849-1:2023に関する主な論争と批判
2023 年の改訂により構造と適用性は改善されましたが、業界の懸念事項はいくつか残っています。
- 実証されていない技術的方法による潜在的な安全性の低下
- 安全関連組み込みソフトウェア(SRESW)の設計要件が範囲を超えています。これらはIEC 61508-3:2010に属します。
- 高PL(PL c以上)向けの冗長性と診断機能を欠いた標準PLC
- 「データなし」科学的根拠のないPL評価アプローチ
- 付録L(ルートC)のEMI耐性評価方法では、堅牢性が十分に保証されない可能性がある。
- 標準の移行が不完全で実装に混乱が生じる
9.0リソース – EN ISO 13849 (PDF) 機械制御機能安全規格
ISO 13849-1:2023 公式規格ダウンロード(EN ISO 版)
ISO 13849-1:2012 公式規格ダウンロード(EN ISO 版)
参考文献
https://www.pilz.com/en-US/support/law-standards-norms/functional-safety/en-iso-13849-1
https://www.iso.org/standard/73481.html
https://knowledge.bsigroup.com/products/safety-of-machinery-safety-related-parts-of-control-systems-general-principles-for-design-5